普通车轮只能实现前进、后退、转弯,无法做到原地横移、斜向滑行、零半径旋转,这也是传统移动设备的局限。而很多智能机器人、仓储AGV、竞赛机器人能实现平面无死角全向移动,灵活穿梭在狭小空间,精准完成对位、避障、微动作,核心秘密就藏在麦克纳姆轮这款特殊的“黑科技车轮”中。它不靠转向机构改变行进方向,仅凭独特结构与力的精准调控,解锁了自由移动的所有可能性。
一、颠覆传统的特殊结构:全向移动的基础
麦克纳姆轮的外观和结构,与普通实心车轮截然不同,这是它实现全能移动的根本前提。普通车轮是完整光滑的轮面,行进时仅能产生前后方向的驱动力,横向摩擦力极强,无法侧向滑动。
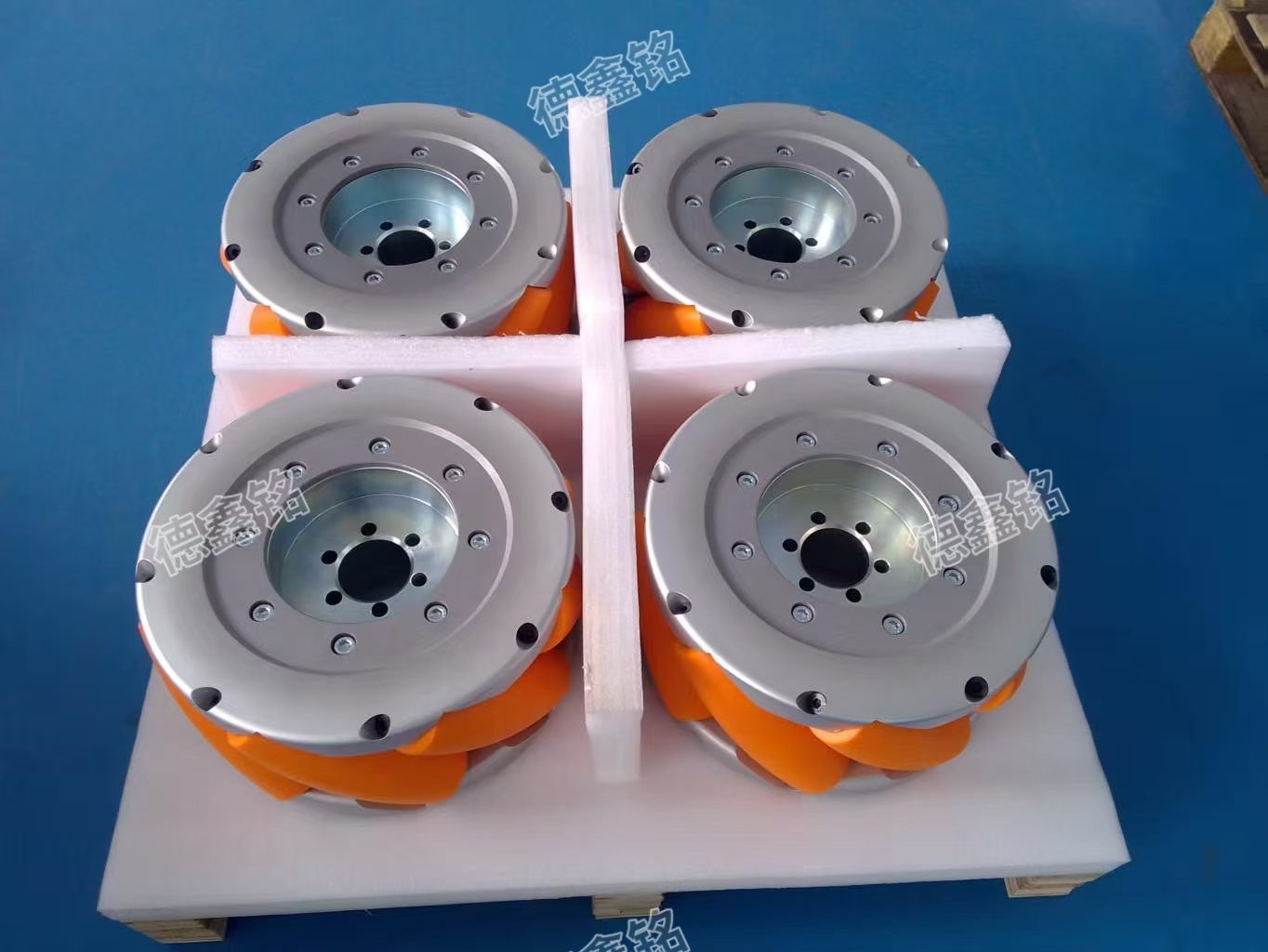
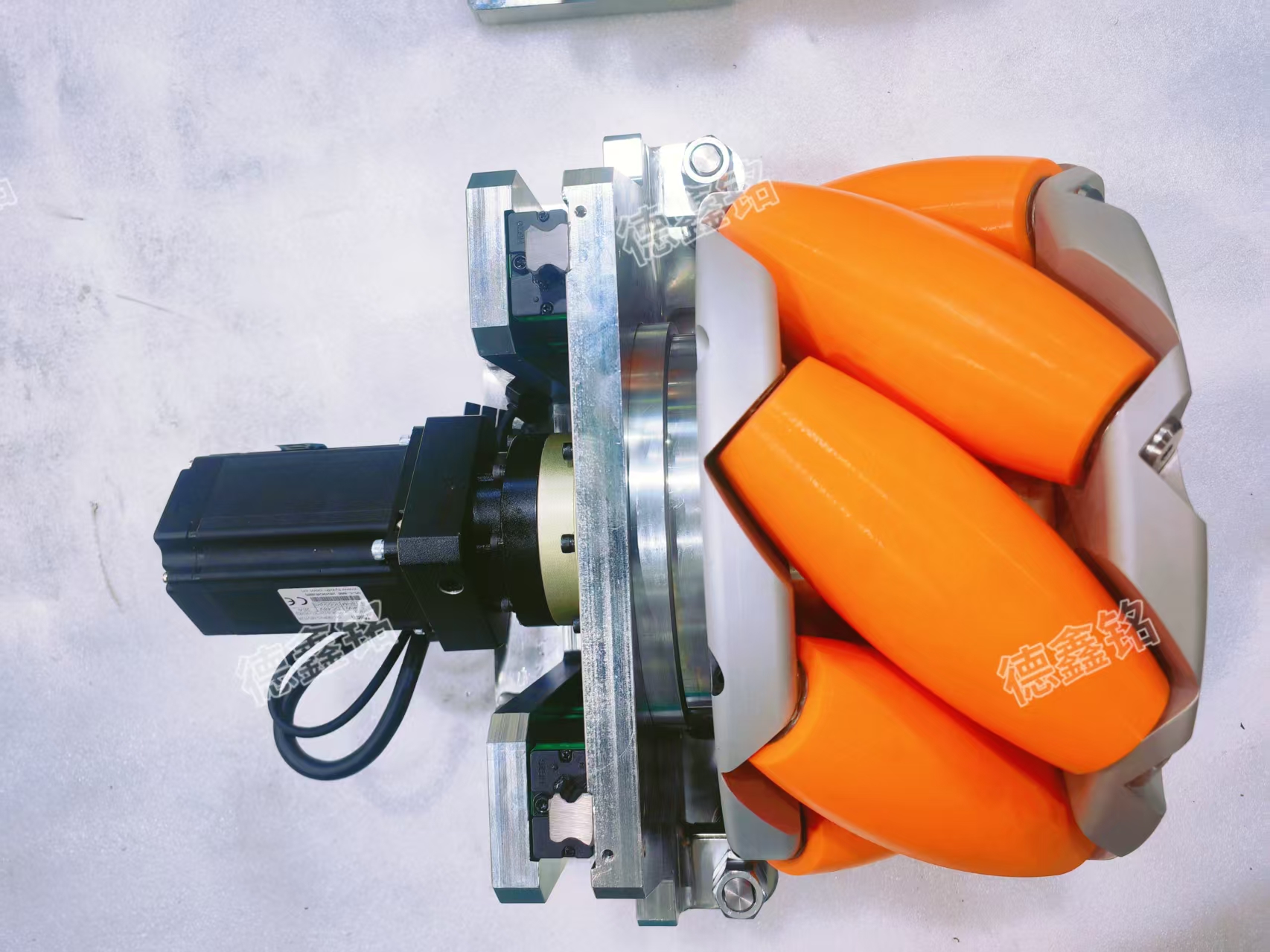
而麦克纳姆轮由中心轮毂和轮缘斜向辊子两部分组成:轮毂作为主体承接电机动力,轮缘均匀排布着多根可自由转动的橡胶小辊子。这些辊子的轴线与主车轮轴线呈固定的45°夹角,错落环绕在轮毂外侧,整体看起来如同斜切的齿轮,结构极具辨识度。
更关键的是,所有小辊子可独立绕自身轴线自由旋转,不会被轮毂的转动锁死。这种特殊结构打破了传统车轮的运动限制,让车轮与地面的摩擦力不再是单一方向,为多维度运动提供了结构支撑。日常应用中,机器人底盘会搭配2个左旋轮+2个右旋轮对称安装,形成完整的全向移动底盘系统。
二、核心原理:力的分解与合成,重构运动逻辑
麦克纳姆轮的神奇之处,本质是力学分力的精准调控。当电机驱动轮毂顺时针或逆时针旋转时,轮缘的斜向辊子与地面产生接触摩擦力,这股摩擦力不会单一向前或向后,而是会自动拆解为两个相互垂直的分力:
一是纵向分力,平行于机器人前后行进方向,负责提供前进、后退的动力;
二是横向分力,垂直于机器人行进方向,负责提供左右横移的动力。
单个麦克纳姆轮旋转时,始终同时输出纵向和横向两组动力,只是方向随车轮转向改变。而机器人底盘的四个麦克纳姆轮为对称手性结构,左旋轮和右旋轮产生的横向分力方向相反、纵向分力方向可同步统一。
通过主控系统独立控制四个车轮的转速、转向,就能灵活控制所有分力的叠加与抵消,最终合成任意方向的合力,彻底摆脱传统车轮的运动束缚。
三、四轮协同:解锁所有自由移动姿态
依靠分力的组合变化,搭载麦克纳姆轮的机器人可以实现平面内所有移动姿态,无需转动车身、无需预留转弯半径,适配各类复杂场景:
1. 直线前进/后退:四个车轮以相同转速、相同方向转动,各组横向分力相互抵消,纵向分力完全叠加,机器人平稳直线行进,无左右偏移。
2. 原地左右横移:左右两侧车轮反向转动,纵向分力相互抵消,横向分力统一叠加,机器人像螃蟹一样平稳横向滑动,无需掉头转向。
3. 任意角度斜向移动:调整四个车轮的转速配比,让纵向、横向分力同时存在且比例可控,机器人可精准完成45°、30°等任意角度的斜向平移,灵活穿梭障碍物。
4. 原地零半径旋转:同侧车轮同向转动、左右车轮反向转动,纵向与横向分力精准抵消,仅保留旋转力矩,机器人可在原地360°平稳自转,极致适配狭小空间转向需求。
四、麦克纳姆轮的实用价值与应用场景
相较于传统差分底盘、阿克曼转向底盘,麦克纳姆轮底盘最大的优势就是全向灵活、运动无死角、控制精准,无需复杂转向机械结构,仅通过电控即可完成所有姿态切换,响应速度更快、容错率更低。
目前这项技术已广泛落地多个领域:工业场景中,仓储AGV搬运机器人、车间重载移动平台依靠它实现狭小工位的精准对位与物料转运;科技领域,竞赛机器人、巡检机器人凭借灵活走位完成复杂赛事任务与密闭空间巡检;民用场景,服务机器人、消杀机器人可在家庭、写字楼、商场等拥挤环境中自由穿行,高效完成工作。
结语
看似简单的一组斜向辊子,通过巧妙的结构设计与力学运用,彻底革新了机器人的移动方式。麦克纳姆轮没有复杂的机械传动结构,却以极简的设计、精准的力控逻辑,破解了传统设备移动受限的难题,成为智能机器人实现自由、灵活、精准移动的核心基石,也是智能移动设备小型化、精细化作业的关键技术支撑。
平等互利,相互协作,在持续合作中共同发展。
电话:165-3822-8877
132-0639-7587
166-5322-7575
邮箱:13792842937@163.com
地址:青岛市黄岛区钱塘江路369号麦克纳姆轮研发中心
地址:山东省青岛市黄岛区千山北路与步云路交叉口东南方向720米左右麦克纳姆轮生产基地