


平等互利,相互协作,在持续合作中共同发展。
新闻中心
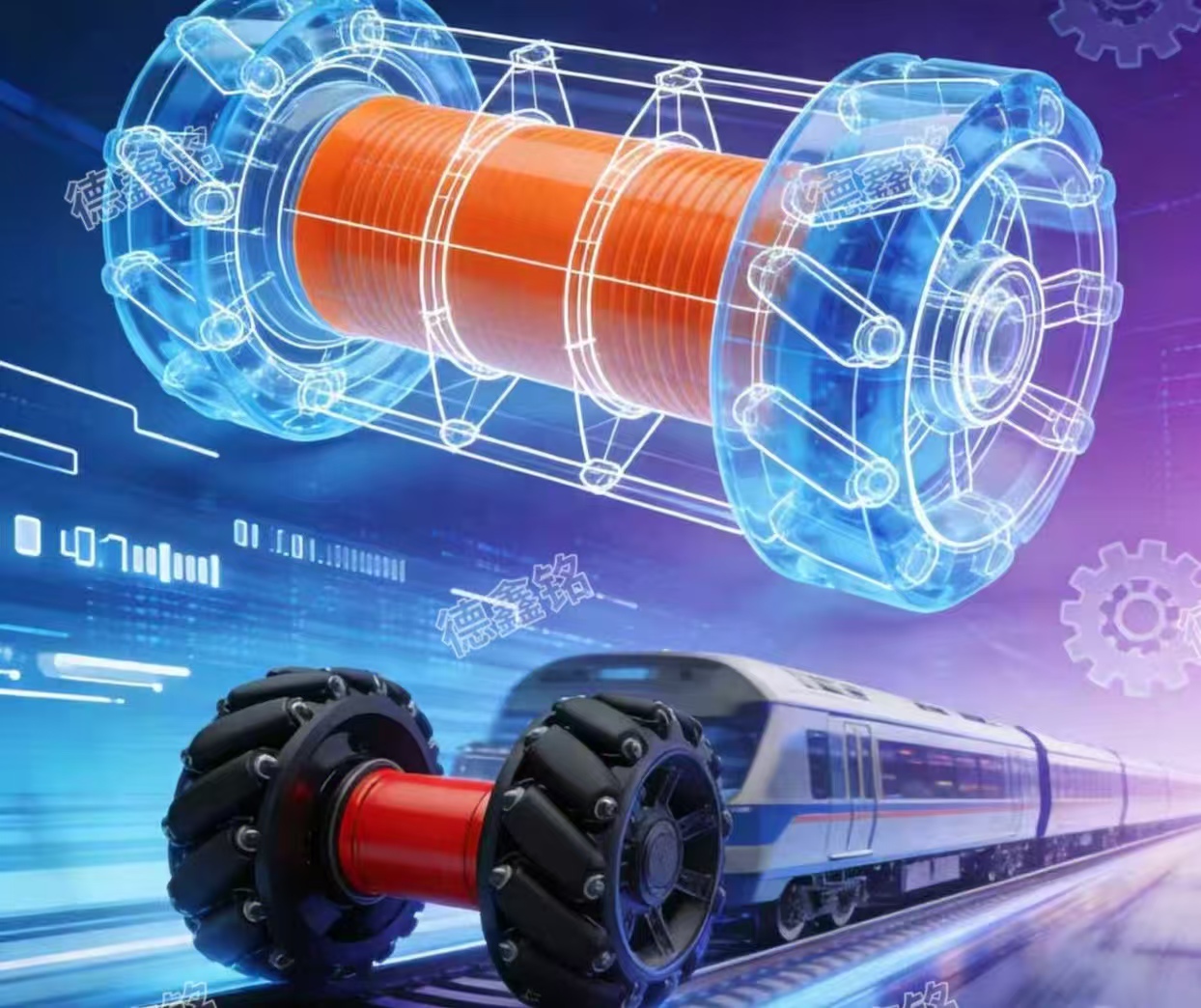
麦克纳姆轮赋能铁路运输:全向移动技术重构智慧运能新生态
在“交通强国”战略引领下,铁路运输正加速向智能化、高效化、集约化转型,重载运输、智能调车、精密检修等场景对移动装备的灵活性、定位精度和空间适应性提出了更高要求。麦克纳姆轮技术凭借其独特的全向移动特性,突破传统轮式装备的运动局限,在铁路运输领域的应用场景持续拓展,成为破解行业痛点、激活运能潜力的核心技术支撑。
2026-01-07
麦克纳姆轮车:赋能军工制造智能化转型的核心装备
在国防现代化建设加速推进的背景下,军工制造业正迎来以数字化、智能化、柔性化为核心的转型浪潮。作为智能制造的关键载体,移动装备的性能直接决定了军工生产、测试、运维全链条的效率与精度。麦克纳姆轮车凭借其独特的全向移动技术优势,打破了传统轮式装备的运动局限,成为破解军工复杂场景作业难题、推动制造智能化升级的核心力量,为军工产业高质量发展注入强劲动能。
2025-12-29
麦克纳姆轮:全向移动的核心结构解析
麦克纳姆轮作为实现设备全向移动的核心部件,凭借其独特的结构设计,打破了传统轮式移动的方向限制,让设备在二维平面内可轻松完成前进、后退、横向平移、斜向移动及原地旋转等复杂动作,广泛应用于工业机器人、自动化物流AGV、精密仪器搬运等领域。这一革命性结构由瑞典工程师本特·伊隆于1973年发明,其核心优势源于精准的结构组合与力的协同作用,下文将详细解析其核心结构组成。
2025-12-24
麦克纳姆轮驱动原理:解锁全向移动的“黑科技”密码
作为全向移动技术的经典应用,麦克纳姆轮凭借独特的设计和巧妙的力学原理,正在重塑多个领域的自动化作业模式。今天,我们就来深度解析它的驱动原理,揭开其“横行霸道”的神秘面纱。
2025-12-18
探秘麦克纳姆轮:小小轮子,为何身价不菲?
在工业自动化领域,自动导引车(AGV)搭载麦克纳姆轮后,可在狭窄的生产线和仓库通道中自由穿梭,高效完成物料搬运任务,显著提升生产效率和空间利用率。在物流仓储行业,配备麦克纳姆轮的智能搬运机器人,能灵活地在货架间取放货物,实现精准分拣和快速运输,大大降低人力成本,提高仓储物流的智能化水平。医疗服务领域,麦克纳姆轮助力服务机器人在医院的走廊、病房等复杂环境中平稳运行,为患者提供药品配送、物资运输等服务,提升医疗服务的便捷性和效率。在航空航天领域,麦克纳姆轮用于卫星测试平台、飞行器模拟装置等设备的移动平台,为科研和测试工作提供了极大的便利,确保在高精度要求下设备能实现精准移动和定位 。
2025-12-11
校企同频共振 智造人才共育 —— 青岛德鑫铭以产教融合激活高质量发展新动能
在青岛西海岸新区的精密制造产业集群中,青岛德鑫铭机械科技有限公司的名字始终与 “创新”“实干” 紧密相连。作为专业研发生产麦克纳姆轮的高新技术企业,其产品已广泛应用于航空航天、高速动车、智能物流等 20 余个领域,年产能力达 80000 个,服务海内外三百家企业。这份成绩单的背后,离不开企业与院校深度绑定的产教融合生态 —— 从技术联合攻关到人才定向培养,德鑫铭正以校企协同之力,破解高端制造领域的人才与技术双重瓶颈。
2025-12-09

