麦克纳姆轮的原理主要并不是基于差速。
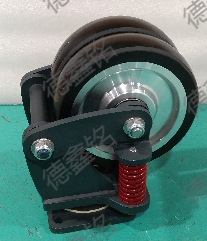
麦克纳姆轮的设计原理在于其独特的结构和运动特性,使得车辆能够实现全方位移动。这种轮子由瑞典麦克纳姆公司的工程师本特·艾隆发明,并在1972年注册了专利。麦克纳姆轮的关键在于其轮毂外圆上均匀分布的小辊子,这些小辊子以一定角度(通常为45度)与轮毂轴线倾斜,既围绕自身轴线旋转,又随轮毂整体转动。这种特殊的设计使得轮子可以横向滑移,从而实现车辆的前进、后退、左右转向、原地旋转、零半径转向以及横向移动等复杂动作。麦克纳姆轮的运动特性不仅提高了车辆的机动性,还使得车辆能够在空间狭窄有限、直角弯偏多的环境内灵活运动,非常适合作为高精运动移动平台使用。
与差速原理不同,麦克纳姆轮的运动是通过调节各个车轮独自的转向和转速来实现的,而不是通过左右车轮的速度差异来控制车辆的行驶方向。这种设计使得麦克纳姆轮运动灵活性更好,能够在任何要求的方向上产生一个合力矢量,从而保证平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。因此,麦克纳姆轮的实现全方位移动的方式与差速原理有所区别,它更多地依赖于轮子的特殊结构和运动学特性,而非简单的速度差异控制
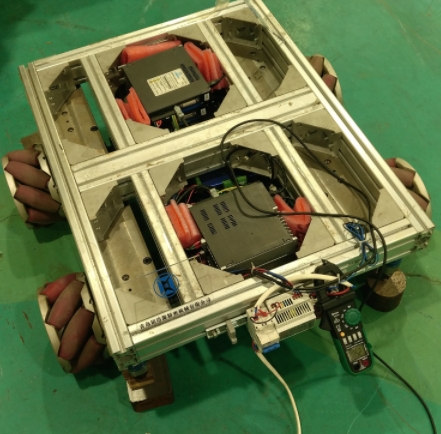
麦克纳姆轮的设计原理是在车轮的外环中安装了与轴心成45度角排列的辊子,这些辊子与地面接触,转动时摩擦力会产生与轮轴呈45度的反推力,这个斜向推力被分为纵向和横向两个向量。左右的轮胎呈镜像排列,每个车轮各自会产生相应的向量,这些向量的合力决定了车体最终的活动状态。通过调节各个车轮独自的转向和转速,可以让车体实现前行、横移、斜行、旋转等运动方式。需要指出的是,要让麦克纳姆轮运动,四个车轮必须有独立的动力源,也就是必须拥有四台发动机或四个电机。
这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量,从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。
因此,麦克纳姆轮通过其独特的结构和运动原理,实现了全方位的移动能力,这种能力是通过精确控制每个轮子的转速和方向来实现的,体现了差速原理的应用。
平等互利,相互协作,在持续合作中共同发展。
电话:165-3822-8877<br/>132-0639-7587<br/>166-5322-7575
邮箱:13792842937@163.com
地址:青岛市黄岛区钱塘江路369号麦克纳姆轮研发中心
地址:山东省青岛市黄岛区千山北路与步云路交叉口东南方向720米左右麦克纳姆轮生产基地